작성 2026. 6. 12.·수정 2026. 6. 12.
- 2차원 변환
- Scaling, Rotation, Shearing, Reflection
- Translation
- 변환의 종류
- 변환의 합성과 Homogeneous Coordinates
- 두 가지 3차원 직교 좌표계
- 3차원 Affine 변환
- Geometric Transformation
- 기하학적 object의 위치, 방향, 크기 또는 형태를 수학적으로 변경하는 과정
→ “점들의 집합을 이동시키는 것” - 복잡한 장면과 애니메이션 생성을 가능하게 함
- Computer graphics에서 필수적임
- 예시:
- Translate
- Rotate
- Scale
- Shear
- Reflect
- “점들의 집합을 이동시키는 것”
- Transformation T는 벡터 공간 S에 있는 임의의 입력 벡터 v를 T(v)로 사상(寫像)함
- 수식 표현: S→ T(v)∣v∈S
- 행렬 곱을 통해 Transformation을 정의할 수 있음
T(v)=Mv
- 이는 행렬 곱셈이 선형 사상(寫像)을 나타내게 되므로
linear transformation이라 부름 - Linear transformation은 다음 조건을 만족해야 함:
T(v1+v2)=T(v1)+T(v2),T(cv)=cT(v)
- 행렬 M 또한 동일한 *선형성(linearity)*을 만족:
M(v1+v2)=Mv1+Mv2,M(cv)=c(Mv)
- 2×2 행렬은 다음과 같은 2차원 linear transformation을 표현할 수 있음:
- uniform scaling
- non-uniform scaling
- rotation
- shearing
- reflection
- x축과 y축 모두에서 동일한 비율로 확대 또는 축소
S=[s00s]p=[xy]⇒p′=[sxsy]
- 예: 배율 ( s = 1.5 )인 scaling을 적용할 경우,
[1.5001.5][xy]=[1.5x1.5y]
- x축과 y축 방향으로 서로 다른 비율로 확대 또는 축소
[sx00sy][xy]=[sxxsyy]
(예: sx = 1.5, sy = 0.8 → x축 방향은 확대, y축 방향은 축소)
- 회전은 행렬 곱으로 표현 가능하며, 따라서 선형 변환임
- 양의 각도는 반시계 방향(CCW, Counter-Clockwise)을 의미함
[cosθsinθ−sinθcosθ][xy]=[xcosθ−ysinθxsinθ+ycosθ]
(예: θ=30° → 30도 반시계 회전)
- 행렬의 각 숫자는 어떤 의미를 가질까?
- 단위 벡터([1,0]T,[0,1]T)을 기준으로 scaling 또는 rotation 시 각각의 column vector가 변환된 축의 방향을 나타냄
- Canonical basis vectors: 직교 좌표계에서 x, y축 방향 단위 벡터
- 결과적으로, 변환된 좌표계의 축 방향을 나타냄
- 행렬의 column vector는 그 행렬의 column space를 구성하는 basis vectors
- Column space: column vector들의 선형 결합으로 표현 가능한 모든 벡터의 집합
- Reflection은 non-uniform scaling의 특수한 경우로 간주할 수 있음
- 예시: x축 방향 reflection
[−1001]
- 물체를 측면으로 밀기(push sideways)
- 예시: x축 기준으로 y에 비례하여 x 이동
[−1001][xy]=[x+ayy]
- 아무런 변환도 수행하지 않는 행렬 → "Doing nothing"
[1001][xy]=[xy]
(도형의 위치, 크기, 방향이 유지됨)
- Translation은 가장 간단한 변환:
T(v)=v+u - 역변환(Inverse):
T−1(v)=v−u
(도식: v 벡터에서 u만큼 이동한 결과가 T(v))
아니오. 선형 변환(linear transformation)이 아님
선형성(linearity)을 만족하지 않음:
T(v1+v2)=T(v1)+T(v2)T(cv)=cT(v)
예:
cT(v)=c(v+b)=cv+cb=T(cv)=cv+b
벡터 덧셈을 사용해 표현 가능:
T(v)=v+u
선형 변환과 결합할 수 있음:
T(v)=Mv+u
→ Affine transformation
- Linear transformation
- Scaling, Rotation, Reflection, Shearing
- 행렬 곱셈으로 표현 가능
T(v)=Mv
- Translation
T(v)=v+u
- Affine transformation
- 선형 변환과 translation을 결합한 형태
T(v)=Mv+u
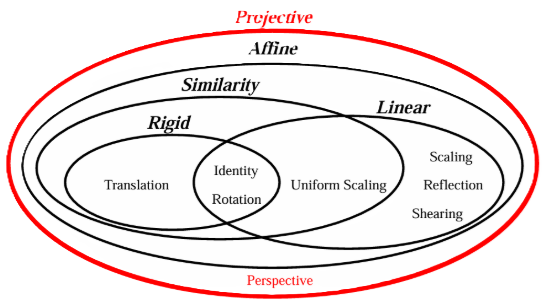
- 모든 점 사이의 거리를 유지함
∥g(u)−g(v)∥=∥u−v∥,∀u,v∈R3(g:rigid transform map)
- "Handedness"를 보존함:
- 선형 변환 중 handedness를 보존하는 회전의 조건:
g(u)×g(v)=g(u×v),∀u,v∈R3
- Translation은 방향을 바꾸지 않으므로 영향을 주지 않음
- Rigid transformation의 예:
- Translation
- Identity
- Rotation
- 일부 문헌에서는 reflection을 rigid로 분류하기도 하나, 본 강의에서는 포함하지 않음
- 각도를 보존함
- (rigid transformation도 각도 보존 포함)
- Similarity transformation의 예:
- Translation
- Identity
- Rotation
- Uniform Scaling
- 일부 문헌에서는 reflection도 포함하나, 본 강의에서는 다루지 않음
- 원점을 보존함
- 포함되는 변환들:
- Translation
- Identity
- Rotation
- Uniform Scaling
- Scaling
- Reflection
- Shearing
- 직선을 보존함
- 어떤 물체에 T 변환을 적용한 후, S 변환을 추가 적용:
p→T(p)→S(T(p))=(S∘T)(p)
- 2D linear transformation의 합성은
2×2 행렬 곱셈으로 표현 가능:T(p)=MTp;S(p)=MSp
(S∘T)(p)=MSMTp=(MSMT)p=MS(MTp)
(예: Scale → Rotate vs Rotate → Scale 결과가 다름)
- 선형 변환(회전, 스케일 등)과 translation을
일관된 방식으로 표현할 수 없음 - Affine 변환의 합성은 복잡해짐:
T(p)=MTp+uTS(p)=MSp+uS
(S∘T)(p)=MS(MTp+uT)+uS=(MSMT)p+(MSuT+uS)
- 더 깔끔한 표현 방식이 필요함
→ Homogeneous coordinates
- 핵심 아이디어: 2D 점을 3D 좌표계 상에 표현
- 벡터에는 추가 성분(w), 행렬에는 추가 행/열을 추가
- 점에는 항상 w=1
- 2D 점 [x, y]T→[x, y, 1]T
- 2D linear transformation의 표현:
ac0bd0001xy1=ax+bycx+dy1
- 2D translation의 표현:
100010ts1xy1=x+ty+s1
- 2D affine transformation의 표현:
m11m210m12m220uxuy1
- Affine transformation 합성은 3×3 행렬 곱셈으로 간단하게 처리 가능:
T(p)=MTp+uTS(p)=MSp+uS
→ block 행렬 표현:
T(p)=[MT0uT1],S(p)=[MS0uS1]
(S∘T)(p)=[MS0uS1][MT0uT1][p1]=[(MSMT)p+(MSuT+uS)1]
- 결과는 이전 방식과 같지만, 훨씬 간단하고 깔끔함
cf. 기존 표현과 비교:
(S∘T)(p)=MS(MTp+uT)+uS
=(MSMT)p+(MSuT+uS)
- 2D 점에는 (x, y)T 대신 (x, y, 1)T 사용
- 2D linear transformation에는 2×2 행렬 대신 3×3 행렬 사용
- 2D translation에도 벡터 덧셈 대신 3×3 행렬 사용
→ linear transformation과 translation을 일관된 방식으로 처리할 수 있음!
- Coordinate system (좌표계)
- Cartesian coordinate system (직교좌표계)
- 2D 좌표계 → z축이 포함된 3D 좌표계로 확장됨
- 우리가 사용하는 시스템: Right-handed Cartesian Coordinates
| 항목 | Right-handed | Left-handed |
|---|
| 회전 방향 | 축 기준 반시계 방향 | 축 기준 시계 방향 |
| 사용 예시 | OpenGL, Maya, Houdini, AutoCAD, Physics & Math | DirectX, Unity, Unreal 등 |
(이미지: 오른손 법칙과 왼손 법칙 설명)
- 2D에서의 선형 변환은 다음과 같은 행렬 곱셈으로 표현됨:
[m11m21m12m22][pxpy]
m11m210m12m220001pxpy1
3D에서의 선형 변환은 다음 행렬 곱셈으로 표현됨:
- 3x3 matrix (in Cartesian coordinates)
또는 - 4x4 matrix (in homogeneous coordinates)
m11m21m31m12m22m32m13m23m33pxpypzor m11m21m310m12m22m320m13m23m3300001pxpypz1
Scaling (크기 조절):
Ss=Sx000Sy000Sz(3D)Ss=Sx0000Sy0000Sz00001(3D-H)
Shear (in x, based on z position):
Hx,d=100dy10dz01orHx,d=1000dy100dz0100001
Rotation about x-axis:
Rx,θ=1000cosθsinθ0−sinθcosθ
Rotation about y-axis:
Ry,θ=cosθ0−sinθ010sinθ0cosθ
Rotation about z-axis:
Rz,θ=cosθsinθ0−sinθcosθ0001
(오른손 법칙에 따라 z축을 기준으로 위에서 아래로 보는 시점에서 반시계 방향 회전)
- 2D에서의 Translation은 다음 두 방식으로 표현 가능:
Vector addition (in Cartesian coordinates):
[pxpy]+[uxuy]
Matrix multiplication (in homogeneous coordinates):
100010uxuy1pxpy1
- 3D에서의 Translation도 유사하게 표현 가능:
Vector addition (Cartesian coordinates):
pxpypz+uxuyuz
Matrix multiplication (homogeneous coordinates):
100001000010uxuyuz1pxpypz1
- Homogeneous coordinates에서는 2D affine transformation을 3×3 행렬 곱으로 표현할 수 있음:
m11m210m12m220uxuy1
- Homogeneous coordinates에서는 3D affine transformation을
4×4 행렬 곱으로 표현할 수 있음:
m11m21m310m12m22m320m13m23m330uxuyuz1
- p라는 점 집합에 대해 affine transformation M을 적용하면:
M=m11m21m310m12m22m320m13m23m330u1u2u31
pi′←Mpi
p1′←Mp1p2′←Mp2p3′←Mp3…pN′←MpN
- 여러 개의 affine transformation (예: M₁, M₂)을 순차적으로 적용할 수 있음
- 각 점마다 개별적으로:
pi′′←M2M1pi
p1′′←M2M1p1p2′′←M2M1p2p3′′←M2M1p3…pN′′←M2M1pN

